Geometric Modelling
Intuitive, Interactive Shape Modelling
 Interactive modelling of 3D shapes on a computer should be as simple
and intuitive as doodling 2D shapes using pencil and paper. Simpler,
in fact, since on a computer changes can always be undone, and the
user is more free to explore and experiment.
Unfortunately, completely intuitive, interactive modelling of shapes
seems to be an elusive goal. Some researchers attack the problem of
intuitive sculpting from a user interface perspective. Perhaps the
best example is the well-known gesture-based system, Teddy, by Takeo
Igarashi. It seems likely that by a careful design of user friendly
interfaces, we can come a long way towards intuitive sculpting, but,
unfortunately, it also seems that the underlying representation will
be an obstacle - simply because effective modelling often requires
the user to be aware of the parameters of the representation.
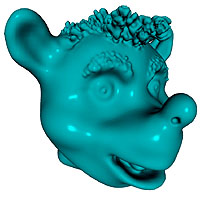
The goal of this project is to explore new methods for shape modelling
that allow the user to be completely unaware of the underlying
representation so that she can focus solely on the task of
modelling. Inroads have been made, using the volume representation in
conjunction with the Level-Set Method. Future challenges involve
handling high resolution detail and adaptive resolution. We are also
looking into the application of shape modelling techniques to surgery
planning. This is also a part of the "Visualization and Manipulation
of Medical Data" project discussed elsewhere.
more
Interactive modelling of 3D shapes on a computer should be as simple
and intuitive as doodling 2D shapes using pencil and paper. Simpler,
in fact, since on a computer changes can always be undone, and the
user is more free to explore and experiment.
Unfortunately, completely intuitive, interactive modelling of shapes
seems to be an elusive goal. Some researchers attack the problem of
intuitive sculpting from a user interface perspective. Perhaps the
best example is the well-known gesture-based system, Teddy, by Takeo
Igarashi. It seems likely that by a careful design of user friendly
interfaces, we can come a long way towards intuitive sculpting, but,
unfortunately, it also seems that the underlying representation will
be an obstacle - simply because effective modelling often requires
the user to be aware of the parameters of the representation.
The goal of this project is to explore new methods for shape modelling
that allow the user to be completely unaware of the underlying
representation so that she can focus solely on the task of
modelling. Inroads have been made, using the volume representation in
conjunction with the Level-Set Method. Future challenges involve
handling high resolution detail and adaptive resolution. We are also
looking into the application of shape modelling techniques to surgery
planning. This is also a part of the "Visualization and Manipulation
of Medical Data" project discussed elsewhere.
more
Contact:
Andreas Baerentzen
Structure from Motion
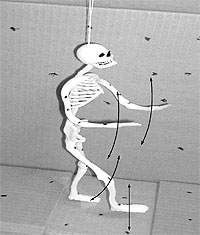 The topic of this project is structure from motion, i.e. the inference of 3D
structure of a usually rigid object from normal images hereof. The primary
focus is on:
The topic of this project is structure from motion, i.e. the inference of 3D
structure of a usually rigid object from normal images hereof. The primary
focus is on:
1) the statistical issues regarding this highly popular problem, i.e. robust
statistics and the including of prior knowledge.
2) The extension to dealing with non-rigid objects.
3) The estimation of how the objects surface, once a crude structure and
camera motion have been estimated.
Contact:
Henrik Aanćs